Found an issue with this page?
Edit on GitHub
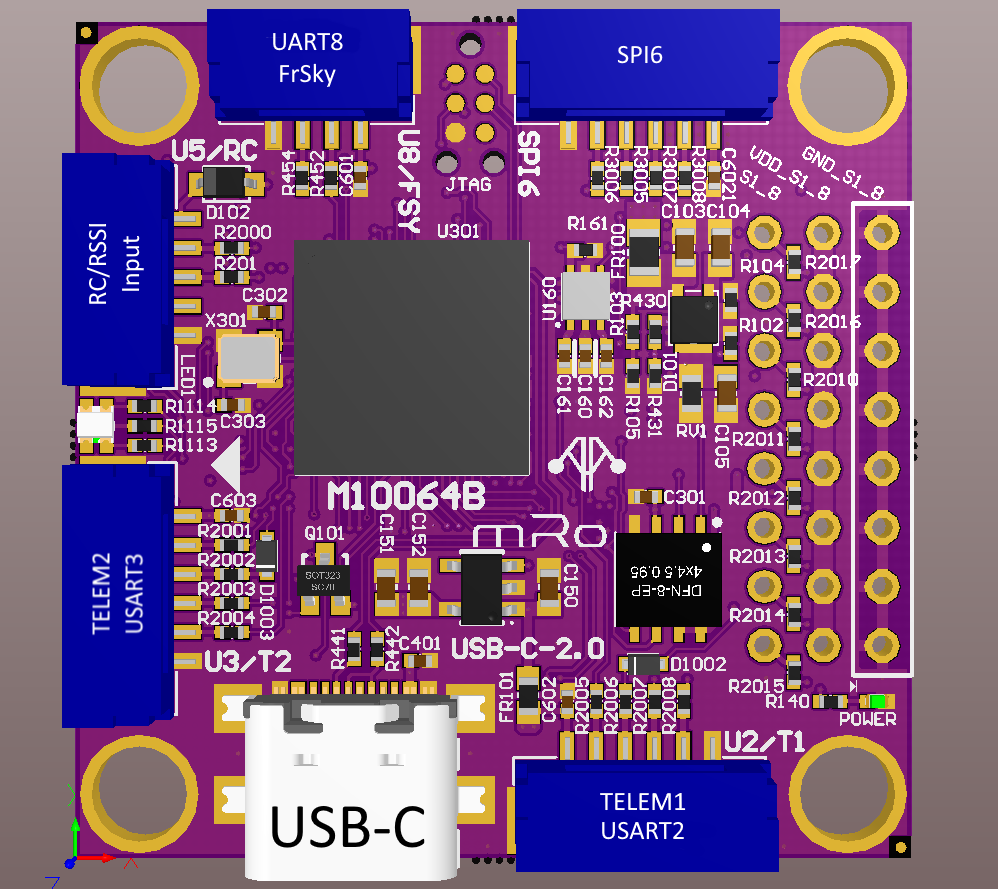
mRo Pixracer Pro
by mRobotics
Community
Closed Hardware
ArduPilot notes the Pixracer Pro is still evolving, so users should review release updates when deploying new firmware builds.
Key Specifications
Mounting Pattern
Custom
Connectivity
7 UARTs • 1 SPI • 2 CAN
Power
5–5.5 V • USB
Onboard Sensors
3× IMU • 1× Barometer • 1× Magnetometer
Firmware Support
Detailed Specifications
Additional Features
Value-add capabilities bundled with the controller.- ✓ 256KB FRAM and microSD logging for high-rate data capture
- ✓ Dual DroneCAN ports and dedicated FrSky telemetry UART
- ✓ Selectable 3.3V or 5V servo rail levels for ESC compatibility
Core Specifications
Quick reference for the primary hardware capabilities.
| MCU | Mounting | Custom | |
| Power | 5–5.5 V • USB | I/O Overview | 7 UARTs • 1 SPI • 2 CAN |
| PWM & Storage | 8 PWM outputs • microSD logging | Sensors | 3× IMU • 1× Barometer • 1× Magnetometer |
Hardware Overview
Core MCU, mounting, and mechanical data.
Base hardware specification
Default
| MCU | Mounting | Custom |
Power Supply
Input rails, regulators, and redundancy. Voltage —
Inputs 2
Redundancy —
Power Inputs
USB USB
Connector:
USB Type-C
Voltage:
5–5.5 V
POWER Power Module
Connector:
PowerBrick (JST-GH 6-pin)
Voltage:
5–5.5 V
| Input Voltage | — | Redundancy | — |
Ultra-low-noise regulators recommended with optional ACSP4 power supply.
Connectivity & I/O
Port availability, buses, and expansion options.| UARTs | 7 | CAN Bus | 2 |
| PWM Outputs | 8 | SD Card | ✓ Yes |
| Ethernet | ✗ No | ||
Peripheral Ports
| Port | Type | Default Function | Voltage / Level | Connector | Notes |
|---|---|---|---|---|---|
| TELEM1 | UART | Primary MAVLink telemetry | 3.3 V signal / 5 V selectable supply | JST-GH 6-pin | Hardware flow control with selectable 3.3 V or 5 V logic level for telemetry radios. |
| TELEM2 | UART | Secondary telemetry or RTK link | 3.3 V signal / 5 V selectable supply | JST-GH 6-pin | Full-duplex UART with RTS/CTS for redundant radios or companion computers. |
| UART1/UART7 harness | UART | Auxiliary payload and console UARTs | 3.3 V signal | JST-GH 8-pin | Combined harness exposing USART1 and UART7 for scripting, companion links, or peripheral control. |
| GPS/I2C | GPS | GPS + compass harness | 3.3 V signal / 5 V supply | JST-GH 6-pin | Provides GNSS UART alongside shared SDA/SCL for external magnetometers. |
| FrSky UART8 | UART | SmartPort telemetry | 3.3 V signal | JST-GH 4-pin | Dedicated USART8 header for FrSky SmartPort in/out with power and ground. |
| RCIN/RSSI | RC | Serial RC input with RSSI | 3.3 V signal / 4.5 V receiver supply | JST-GH 5-pin | Supports SBUS, DSM, SumD, ST24, and PPM with dedicated analog RSSI input. |
| CAN1 | CAN | DroneCAN peripheral bus | Differential CAN / 5 V supply | JST-GH 4-pin | Powered CAN-FD port for smart power modules, ESCs, or sensors. |
| CAN2 | CAN | Redundant DroneCAN bus | Differential CAN / 5 V supply | JST-GH 4-pin | Secondary CAN channel for redundant peripherals or ESC networks. |
| PWM OUT (1-8) | PWM | Motor/servo outputs | Selectable 3.3/5 V signal (servo rail) | 8-channel servo header | Supports PWM or DShot with configurable signal level jumpers. |
| SPI6 | SPI | External SPI payloads | 3.3 V | JST-GH 6-pin | Breaks out SPI6 with chip select for sensors, loggers, or companion devices. |
| Power Brick | Power | Primary power module input | 5.0-5.5 V | JST-GH 6-pin | Accepts ACSP4 or similar power modules with current and voltage telemetry. |
| USB-C | USB | Console and firmware updates | 5 V | USB Type-C | Provides composite USB device with bootloader, console, and SLCAN access. |
| Onboard buzzer | Other | Audible status output | 5 V | Onboard driver | High-output piezo buzzer driven by dedicated amplifier for alarms. |
| RGB LED | Other | Status indication | 5 V | Onboard LED | Addressable RGB status LED indicating flight mode and warnings. |
Onboard Sensors
IMU, barometer, and magnetometer load-outs per revision.| IMU | |||
| Barometer | |||
| Magnetometer | |||
Known Issues & Advisories
BMI088 I²C driver produces unstable gyro data
PX4's bmi088_i2c driver reports severe gyro jitter and unusable orientation on Crazyflie and other I²C-based boards.
Medium
Reported
Affects Bosch Sensortec BMI088
Onboard IMU
Documentation & Vendor Resources
Contributors: dependabot[bot]
Last updated:
View History