Found an issue with this page?
Edit on GitHub
Mateksys F405-Wing
by Matek Systems
Community
Closed Hardware
Board does not include an onboard compass; use an external GPS/compass module for autonomous flight modes.
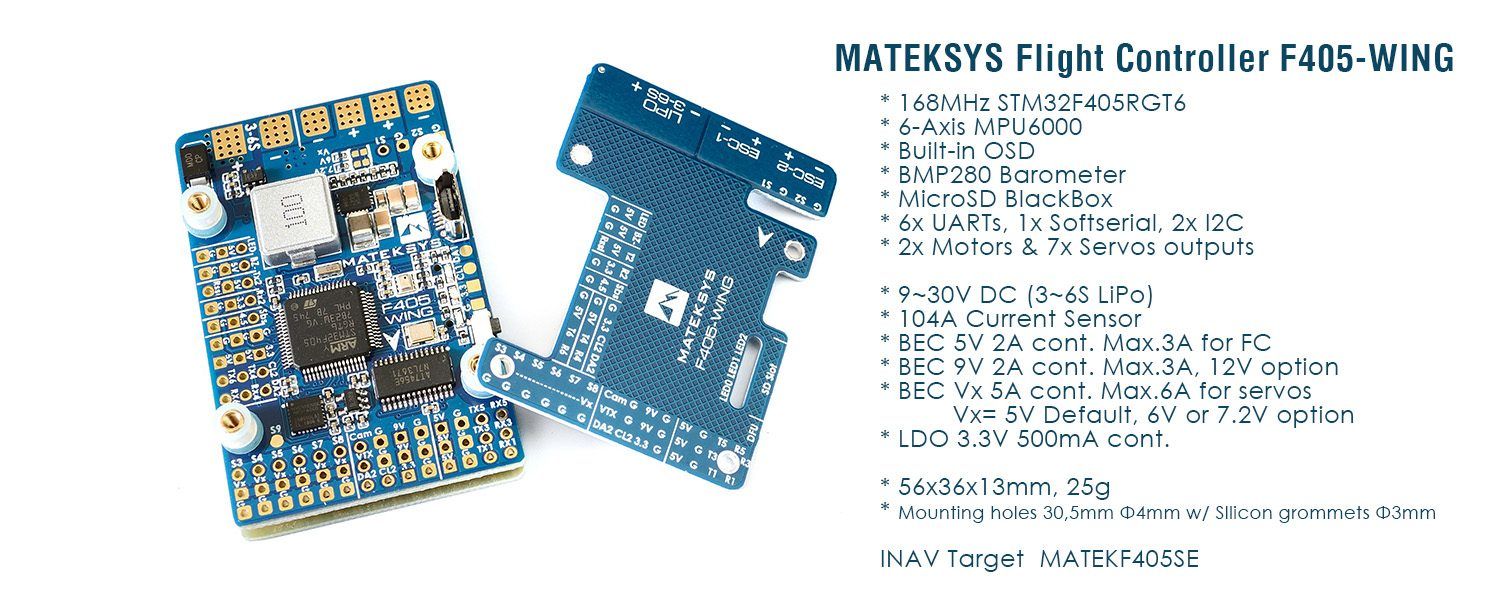
Key Specifications
Mounting Pattern
Wing Form Factor
Connectivity
6 UARTs • 1 I²C
Power
9–30 V
Onboard Sensors
1× IMU • 1× Barometer
Firmware Support
Reference Docs
Detailed Specifications
Additional Features
Value-add capabilities bundled with the controller.- ✓ STM32F405 flight controller tailored for fixed-wing and VTOL builds.
- ✓ Integrated current and voltage monitoring with ArduPilot defaults for calibration.
- ✓ Onboard analog OSD and 10 DShot-capable outputs for motor and servo control.
Core Specifications
Quick reference for the primary hardware capabilities.
| MCU | Mounting | Wing Form Factor | |
| Power | 9–30 V | I/O Overview | 6 UARTs • 1 I²C |
| PWM & Storage | 10 PWM outputs • no microSD slot | Sensors | 1× IMU • 1× Barometer |
Hardware Overview
Core MCU, mounting, and mechanical data.
Base hardware specification
Default
| MCU | Mounting | Wing Form Factor | |
| Dimensions | 36 × 56 × 15 mm | Weight | 25g |
Power Supply
Input rails, regulators, and redundancy. Voltage —
Inputs 1
Redundancy —
Power Inputs
POWER
Voltage:
9–30 V
main input
| Input Voltage | — | Redundancy | — |
Onboard regulators power the flight controller and provide dedicated outputs for peripherals and video transmitters.
Connectivity & I/O
Port availability, buses, and expansion options.| UARTs | 6 | CAN Bus | 0 |
| PWM Outputs | 10 | SD Card | ✗ No |
| Ethernet | ✗ No | ||
Peripheral Ports
| Port | Type | Default Function | Voltage / Level | Connector | Notes |
|---|---|---|---|---|---|
| UART1 (TX1/RX1) | UART | GPS receiver | 3.3 V signal | JST-SH pigtail / solder pads | Default mapping for external GPS and compass modules. |
| UART2 (TX2/RX2) | UART | MAVLink telemetry | 3.3 V signal | JST-SH pigtail / solder pads | Commonly wired to telemetry radios or USB serial adapters. |
| UART3 (TX3/RX3) | UART | RC receiver / SmartPort | 3.3 V signal | JST-SH receiver header | Hardware inverter supports SBUS while pads expose uninverted signal for CRSF/FPort. |
| UART4 (TX4/RX4) | UART | VTX or camera control | 3.3 V signal | Solder pads | Often assigned to SmartAudio, IRC Tramp, or camera serial control. |
| UART5 (TX5/RX5) | UART | AUX telemetry or ESC feedback | 3.3 V signal | Solder pads | General-purpose UART for ESC telemetry, rangefinders, or companion devices. |
| UART6 (TX6/RX6) | UART | Spare serial / softserial target | 3.3 V signal | Solder pads | Routed near the MCU for scripting engines, companion links, or inverter bypass. |
| I2C (SCL/SDA) | I2C | Compass / airspeed sensor | 3.3 V | JST-SH 4-pin | Shared external bus for digital airspeed sensors and magnetometers. |
| RCIN | RC | PPM/SBUS/CRSF receiver input | 3.3 V signal / 5 V supply | Dedicated receiver header | Supports inverted SBUS via onboard inverter with jumpers for serial protocols. |
| PWM OUT (1-6) | PWM | Primary motor/servo outputs | 5 V servo rail | Servo headers | Six outputs supporting PWM or DShot for VTOL motors and control surfaces. |
| PWM OUT (7-10) | PWM | Auxiliary outputs / camera trigger | 5 V servo rail | Servo headers and pads | Additional outputs for flaps, retracts, or camera trigger lines. |
| Video IN/OUT | Other | Analog FPV pass-through with OSD | 5 V camera rail | Solder pads | Provides camera and VTX pads with integrated OSD overlay and filtered supply. |
| Power IN (BAT) | Power | Main battery input | 9-30 V | XT60 / solder pads | Primary LiPo input feeding onboard BECs and current sensor. |
| 5V BEC | Power | Regulated 5 V peripheral rail | 5 V @ 3 A | 5 V pads | Powers receivers, servos, and auxiliary electronics from onboard regulator. |
| 9V/Camera BEC | Power | Video transmitter supply | 9 V @ 2 A | VTX pads | Filtered regulator dedicated to analog/HD video transmitters. |
| Micro-USB | USB | Console and firmware updates | 5 V | Micro-USB | Provides Betaflight/ArduPilot console access and firmware flashing. |
Onboard Sensors
IMU, barometer, and magnetometer load-outs per revision.| IMU | |||
| Barometer | |||
Known Issues & Advisories
No documented issues for Base Hardware
Sensor advisories and controller errata for this revision will appear here once reported.
Documentation & Vendor Resources
Contributors: dependabot[bot]
Last updated:
View History